
Chapter 7. Sockets
Table of Contents
7.1. Synopsis
BSD sockets take interprocess communications to a new level. It is no longer necessary for the communicating processes to run on the same machine. They still can, but they do not have to.
Not only do these processes not have to run on the same machine, they do not have to run under the same operating system. Thanks to BSD sockets, your FreeBSD software can smoothly cooperate with a program running on a Macintosh®, another one running on a Sun™ workstation, yet another one running under Windows® 2000, all connected with an Ethernet-based local area network.
But your software can equally well cooperate with processes running in another building, or on another continent, inside a submarine, or a space shuttle.
It can also cooperate with processes that are not part of a computer (at least not in the strict sense of the word), but of such devices as printers, digital cameras, medical equipment. Just about anything capable of digital communications.
7.2. Networking and Diversity
We have already hinted on the diversity of networking. Many different systems have to talk to each other. And they have to speak the same language. They also have to understand the same language the same way.
People often think that body language is universal. But it is not. Back in my early teens, my father took me to Bulgaria. We were sitting at a table in a park in Sofia, when a vendor approached us trying to sell us some roasted almonds.
I had not learned much Bulgarian by then, so, instead of saying no, I shook my head from side to side, the "universal" body language for no. The vendor quickly started serving us some almonds.
I then remembered I had been told that in Bulgaria shaking your head sideways meant yes. Quickly, I started nodding my head up and down. The vendor noticed, took his almonds, and walked away. To an uninformed observer, I did not change the body language: I continued using the language of shaking and nodding my head. What changed was the meaning of the body language. At first, the vendor and I interpreted the same language as having completely different meaning. I had to adjust my own interpretation of that language so the vendor would understand.
It is the same with computers: The same symbols may have different, even outright opposite meaning. Therefore, for two computers to understand each other, they must not only agree on the same language, but on the same interpretation of the language.
7.3. Protocols
While various programming languages tend to have complex syntax and use a number of multi-letter reserved words (which makes them easy for the human programmer to understand), the languages of data communications tend to be very terse. Instead of multi-byte words, they often use individual bits. There is a very convincing reason for it: While data travels inside your computer at speeds approaching the speed of light, it often travels considerably slower between two computers.
As the languages used in data communications are so terse, we usually refer to them as protocols rather than languages.
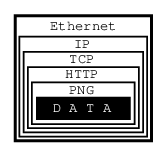
As data travels from one computer to another, it always uses more than one protocol. These protocols are layered. The data can be compared to the inside of an onion: You have to peel off several layers of "skin" to get to the data. This is best illustrated with a picture:
Figure 1. Protocol Layers
In this example, we are trying to get an image from a web page we are connected to via an Ethernet.
The image consists of raw data, which is simply a sequence of RGB values that our software can process, i.e., convert into an image and display on our monitor.
Alas, our software has no way of knowing how the raw data is organized: Is it a sequence of RGB values, or a sequence of grayscale intensities, or perhaps of CMYK encoded colors? Is the data represented by 8-bit quanta, or are they 16 bits in size, or perhaps 4 bits? How many rows and columns does the image consist of? Should certain pixels be transparent?
I think you get the picture…
To inform our software how to handle the raw data, it is encoded as a PNG file. It could be a GIF, or a JPEG, but it is a PNG.
And PNG is a protocol.
At this point, I can hear some of you yelling, "No, it is not! It is a file format!"
Well, of course it is a file format. But from the perspective of data communications, a file format is a protocol: The file structure is a language, a terse one at that, communicating to our process how the data is organized. Ergo, it is a protocol.
Alas, if all we received was the PNG file, our software would be facing a serious problem: How is it supposed to know the data is representing an image, as opposed to some text, or perhaps a sound, or what not? Secondly, how is it supposed to know the image is in the PNG format as opposed to GIF, or JPEG, or some other image format?
To obtain that information, we are using another protocol: HTTP. This protocol can tell us exactly that the data represents an image, and that it uses the PNG protocol. It can also tell us some other things, but let us stay focused on protocol layers here.
So, now we have some data wrapped in the PNG protocol, wrapped in the HTTP protocol. How did we get it from the server?
By using TCP/IP over Ethernet, that is how. Indeed, that is three more protocols. Instead of continuing inside out, I am now going to talk about Ethernet, simply because it is easier to explain the rest that way.
Ethernet is an interesting system of connecting computers in a local area network (LAN). Each computer has a network interface card (NIC), which has a unique 48-bit ID called its address. No two Ethernet NICs in the world have the same address.
These NICs are all connected with each other. Whenever one computer wants to communicate with another in the same Ethernet LAN, it sends a message over the network. Every NIC sees the message. But as part of the Ethernet protocol, the data contains the address of the destination NIC (among other things). So, only one of all the network interface cards will pay attention to it, the rest will ignore it.
But not all computers are connected to the same network. Just because we have received the data over our Ethernet does not mean it originated in our own local area network. It could have come to us from some other network (which may not even be Ethernet based) connected with our own network via the Internet.
All data is transferred over the Internet using IP, which stands for Internet Protocol. Its basic role is to let us know where in the world the data has arrived from, and where it is supposed to go to. It does not guarantee we will receive the data, only that we will know where it came from if we do receive it.
Even if we do receive the data, IP does not guarantee we will receive various chunks of data in the same order the other computer has sent it to us. So, we can receive the center of our image before we receive the upper left corner and after the lower right, for example.
It is TCP (Transmission Control Protocol) that asks the sender to resend any lost data and that places it all into the proper order.
All in all, it took five different protocols for one computer to communicate to another what an image looks like. We received the data wrapped into the PNG protocol, which was wrapped into the HTTP protocol, which was wrapped into the TCP protocol, which was wrapped into the IP protocol, which was wrapped into the Ethernet protocol.
Oh, and by the way, there probably were several other protocols involved somewhere on the way. For example, if our LAN was connected to the Internet through a dial-up call, it used the PPP protocol over the modem which used one (or several) of the various modem protocols, et cetera, et cetera, et cetera…
As a developer you should be asking by now, "How am I supposed to handle it all?"
Luckily for you, you are not supposed to handle it all. You are supposed to handle some of it, but not all of it. Specifically, you need not worry about the physical connection (in our case Ethernet and possibly PPP, etc). Nor do you need to handle the Internet Protocol, or the Transmission Control Protocol.
In other words, you do not have to do anything to receive the data from the other computer. Well, you do have to ask for it, but that is almost as simple as opening a file.
Once you have received the data, it is up to you to figure out what to do with it. In our case, you would need to understand the HTTP protocol and the PNG file structure.
To use an analogy, all the internetworking protocols become a gray area: Not so much because we do not understand how it works, but because we are no longer concerned about it. The sockets interface takes care of this gray area for us:

Figure 2. Sockets Covered Protocol Layers
We only need to understand any protocols that tell us how to interpret the data, not how to receive it from another process, nor how to send it to another process.
7.4. The Sockets Model
BSD sockets are built on the basic UNIX® model: Everything is a file. In our example, then, sockets would let us receive an HTTP file, so to speak. It would then be up to us to extract the PNG file from it.
Due to the complexity of internetworking, we cannot just use the open system call, or the open() C function.
Instead, we need to take several steps to "opening" a socket.
Once we do, however, we can start treating the socket the same way we treat any file descriptor:
We can read from it, write to it, pipe it, and, eventually, close it.
7.5. Essential Socket Functions
While FreeBSD offers different functions to work with sockets, we only need four to "open" a socket. And in some cases we only need two.
7.5.1. The Client-Server Difference
Typically, one of the ends of a socket-based data communication is a server, the other is a client.
7.5.1.1. The Common Elements
socket
The one function used by both, clients and servers, is socket(2). It is declared this way:
int socket(int domain, int type, int protocol);
The return value is of the same type as that of open, an integer.
FreeBSD allocates its value from the same pool as that of file handles.
That is what allows sockets to be treated the same way as files.
The domain argument tells the system what protocol family you want it to use.
Many of them exist, some are vendor specific, others are very common.
They are declared in sys/socket.h.
Use PF_INET for UDP, TCP and other Internet protocols (IPv4).
Five values are defined for the type argument, again, in sys/socket.h.
All of them start with “SOCK_”.
The most common one is SOCK_STREAM, which tells the system you are asking for a reliable stream delivery service (which is TCP when used with PF_INET).
If you asked for SOCK_DGRAM, you would be requesting a connectionless datagram delivery service (in our case, UDP).
If you wanted to be in charge of the low-level protocols (such as IP), or even network interfaces (e.g., the Ethernet), you would need to specify SOCK_RAW.
Finally, the protocol argument depends on the previous two arguments, and is not always meaningful.
In that case, use 0 for its value.
The Unconnected Socket Nowhere, in the This is on purpose: To use a telephone analogy, we have just attached a modem to the phone line. We have neither told the modem to make a call, nor to answer if the phone rings. |
sockaddr
Various functions of the sockets family expect the address of (or pointer to, to use C terminology) a small area of the memory.
The various C declarations in the sys/socket.h refer to it as struct sockaddr.
This structure is declared in the same file:
/*
* Structure used by kernel to store most
* addresses.
*/
struct sockaddr {
unsigned char sa_len; /* total length */
sa_family_t sa_family; /* address family */
char sa_data[14]; /* actually longer; address value */
};
#define SOCK_MAXADDRLEN 255 /* longest possible addresses */Please note the vagueness with which the sa_data field is declared, just as an array of 14 bytes,
with the comment hinting there can be more than 14 of them.
This vagueness is quite deliberate. Sockets is a very powerful interface. While most people perhaps think of it as nothing more than the Internet interface-and most applications probably use it for that nowadays-sockets can be used for just about any kind of interprocess communications, of which the Internet (or, more precisely, IP) is only one.
The sys/socket.h refers to the various types of protocols sockets will handle as address families,
and lists them right before the definition of sockaddr:
/* * Address families. */ #define AF_UNSPEC 0 /* unspecified */ #define AF_LOCAL 1 /* local to host (pipes, portals) */ #define AF_UNIX AF_LOCAL /* backward compatibility */ #define AF_INET 2 /* internetwork: UDP, TCP, etc. */ #define AF_IMPLINK 3 /* arpanet imp addresses */ #define AF_PUP 4 /* pup protocols: e.g. BSP */ #define AF_CHAOS 5 /* mit CHAOS protocols */ #define AF_NS 6 /* XEROX NS protocols */ #define AF_ISO 7 /* ISO protocols */ #define AF_OSI AF_ISO #define AF_ECMA 8 /* European computer manufacturers */ #define AF_DATAKIT 9 /* datakit protocols */ #define AF_CCITT 10 /* CCITT protocols, X.25 etc */ #define AF_SNA 11 /* IBM SNA */ #define AF_DECnet 12 /* DECnet */ #define AF_DLI 13 /* DEC Direct data link interface */ #define AF_LAT 14 /* LAT */ #define AF_HYLINK 15 /* NSC Hyperchannel */ #define AF_APPLETALK 16 /* Apple Talk */ #define AF_ROUTE 17 /* Internal Routing Protocol */ #define AF_LINK 18 /* Link layer interface */ #define pseudo_AF_XTP 19 /* eXpress Transfer Protocol (no AF) */ #define AF_COIP 20 /* connection-oriented IP, aka ST II */ #define AF_CNT 21 /* Computer Network Technology */ #define pseudo_AF_RTIP 22 /* Help Identify RTIP packets */ #define AF_IPX 23 /* Novell Internet Protocol */ #define AF_SIP 24 /* Simple Internet Protocol */ #define pseudo_AF_PIP 25 /* Help Identify PIP packets */ #define AF_ISDN 26 /* Integrated Services Digital Network*/ #define AF_E164 AF_ISDN /* CCITT E.164 recommendation */ #define pseudo_AF_KEY 27 /* Internal key-management function */ #define AF_INET6 28 /* IPv6 */ #define AF_NATM 29 /* native ATM access */ #define AF_ATM 30 /* ATM */ #define pseudo_AF_HDRCMPLT 31 /* Used by BPF to not rewrite headers * in interface output routine */ #define AF_NETGRAPH 32 /* Netgraph sockets */ #define AF_SLOW 33 /* 802.3ad slow protocol */ #define AF_SCLUSTER 34 /* Sitara cluster protocol */ #define AF_ARP 35 #define AF_BLUETOOTH 36 /* Bluetooth sockets */ #define AF_MAX 37
The one used for IP is AF_INET.
It is a symbol for the constant 2.
It is the address family listed in the sa_family field of sockaddr that decides how exactly the vaguely named bytes of sa_data will be used.
Specifically, whenever the address family is AF_INET, we can use struct sockaddr_in found in netinet/in.h, wherever sockaddr is expected:
/*
* Socket address, internet style.
*/
struct sockaddr_in {
uint8_t sin_len;
sa_family_t sin_family;
in_port_t sin_port;
struct in_addr sin_addr;
char sin_zero[8];
};We can visualize its organization this way:

Figure 3. sockaddr_in structure
The three important fields are sin_family, which is byte 1 of the structure, sin_port, a 16-bit value found in bytes 2 and 3, and sin_addr, a 32-bit integer representation of the IP address, stored in bytes 4-7.
Now, let us try to fill it out.
Let us assume we are trying to write a client for the daytime protocol, which simply states that its server will write a text string representing the current date and time to port 13.
We want to use TCP/IP, so we need to specify AF_INET in the address family field.
AF_INET is defined as 2.
Let us use the IP address of 132.163.96.1, which is the time server of US federal government (time.nist.gov).
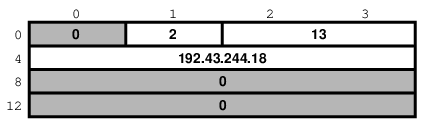
Figure 4. Specific example of sockaddr_in
By the way the sin_addr field is declared as being of the struct in_addr type, which is defined in netinet/in.h:
/*
* Internet address (a structure for historical reasons)
*/
struct in_addr {
in_addr_t s_addr;
};In addition, in_addr_t is a 32-bit integer.
The 132.163.96.1 is just a convenient notation of expressing a 32-bit integer by listing all of its 8-bit bytes, starting with the most significant one.
So far, we have viewed sockaddr as an abstraction.
Our computer does not store short integers as a single 16-bit entity, but as a sequence of 2 bytes.
Similarly, it stores 32-bit integers as a sequence of 4 bytes.
Suppose we coded something like this:
sa.sin_family = AF_INET; sa.sin_port = 13; sa.sin_addr.s_addr = (((((132 << 8) | 163) << 8) | 96) << 8) | 1;
What would the result look like?
Well, that depends, of course. On a Pentium®, or other x86, based computer, it would look like this:
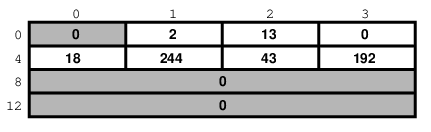
Figure 5. sockaddr_in on an Intel system
On a different system, it might look like this:
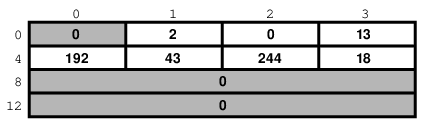
Figure 6. sockaddr_in on an MSB system
And on a PDP it might look different yet. But the above two are the most common ways in use today.
Ordinarily, wanting to write portable code, programmers pretend that these differences do not exist. And they get away with it (except when they code in assembly language). Alas, you cannot get away with it that easily when coding for sockets.
Why?
Because when communicating with another computer, you usually do not know whether it stores data most significant byte (MSB) or least significant byte (LSB) first.
You might be wondering, "So, will sockets not handle it for me?"
It will not.
While that answer may surprise you at first, remember that the general sockets interface only understands the sa_len and sa_family fields of the sockaddr structure.
You do not have to worry about the byte order there (of course, on FreeBSD sa_family is only 1 byte anyway, but many other UNIX® systems do not have sa_len and use 2 bytes for sa_family, and expect the data in whatever order is native to the computer).
But the rest of the data is just sa_data[14] as far as sockets goes.
Depending on the address family, sockets just forwards that data to its destination.
Indeed, when we enter a port number, it is because we want the other computer to know what service we are asking for. And, when we are the server, we read the port number so we know what service the other computer is expecting from us. Either way, sockets only has to forward the port number as data. It does not interpret it in any way.
Similarly, we enter the IP address to tell everyone on the way where to send our data to. Sockets, again, only forwards it as data.
That is why, we (the programmers, not the sockets) have to distinguish between the byte order used by our computer and a conventional byte order to send the data in to the other computer.
We will call the byte order our computer uses the host byte order, or just the host order.
There is a convention of sending the multi-byte data over IP MSB first. This, we will refer to as the network byte order, or simply the network order.
Now, if we compiled the above code for an Intel based computer, our host byte order would produce:
Figure 7. Host byte order on an Intel system
But the network byte order requires that we store the data MSB first:
Figure 8. Network byte order
Unfortunately, our host order is the exact opposite of the network order.
We have several ways of dealing with it. One would be to reverse the values in our code:
sa.sin_family = AF_INET; sa.sin_port = 13 << 8; sa.sin_addr.s_addr = (((((1 << 8) | 96) << 8) | 163) << 8) | 132;
This will trick our compiler into storing the data in the network byte order. In some cases, this is exactly the way to do it (e.g., when programming in assembly language). In most cases, however, it can cause a problem.
Suppose, you wrote a sockets-based program in C. You know it is going to run on a Pentium®, so you enter all your constants in reverse and force them to the network byte order. It works well.
Then, some day, your trusted old Pentium® becomes a rusty old Pentium®. You replace it with a system whose host order is the same as the network order. You need to recompile all your software. All of your software continues to perform well, except the one program you wrote.
You have since forgotten that you had forced all of your constants to the opposite of the host order. You spend some quality time tearing out your hair, calling the names of all gods you ever heard of (and some you made up), hitting your monitor with a nerf bat, and performing all the other traditional ceremonies of trying to figure out why something that has worked so well is suddenly not working at all.
Eventually, you figure it out, say a couple of swear words, and start rewriting your code.
Luckily, you are not the first one to face the problem.
Someone else has created the htons(3) and htonl(3) C functions to convert a short and long respectively from the host byte order to the network byte order, and the ntohs(3) and ntohl(3) C functions to go the other way.
On MSB-first systems these functions do nothing. On LSB-first systems they convert values to the proper order.
So, regardless of what system your software is compiled on, your data will end up in the correct order if you use these functions.
7.5.1.2. Client Functions
Typically, the client initiates the connection to the server. The client knows which server it is about to call: It knows its IP address, and it knows the port the server resides at. It is akin to you picking up the phone and dialing the number (the address), then, after someone answers, asking for the person in charge of wingdings (the port).
connect
Once a client has created a socket, it needs to connect it to a specific port on a remote system. It uses connect(2):
int connect(int s, const struct sockaddr *name, socklen_t namelen);
The s argument is the socket, i.e., the value returned by the socket function.
The name is a pointer to sockaddr, the structure we have talked about extensively.
Finally, namelen informs the system how many bytes are in our sockaddr structure.
If connect is successful, it returns 0.
Otherwise it returns -1 and stores the error code in errno.
There are many reasons why connect may fail.
For example, with an attempt to an Internet connection, the IP address may not exist, or it may be down, or just too busy, or it may not have a server listening at the specified port.
Or it may outright refuse any request for specific code.
Our First Client
We now know enough to write a very simple client, one that will get current time from 132.163.96.1 and print it to stdout.
/*
* daytime.c
*
* Programmed by G. Adam Stanislav
*/
#include <stdio.h>
#include <string.h>
#include <sys/types.h>
#include <sys/socket.h>
#include <netinet/in.h>
#include <unistd.h>
int main() {
int s, bytes;
struct sockaddr_in sa;
char buffer[BUFSIZ+1];
if ((s = socket(PF_INET, SOCK_STREAM, 0)) < 0) {
perror("socket");
return 1;
}
memset(&sa, '\0', sizeof(sa));
sa.sin_family = AF_INET;
sa.sin_port = htons(13);
sa.sin_addr.s_addr = htonl((((((132 << 8) | 163) << 8) | 96) << 8) | 1);
if (connect(s, (struct sockaddr *)&sa, sizeof sa) < 0) {
perror("connect");
close(s);
return 2;
}
while ((bytes = read(s, buffer, BUFSIZ)) > 0)
write(1, buffer, bytes);
close(s);
return 0;
}Go ahead, enter it in your editor, save it as daytime.c, then compile and run it:
% cc -O3 -o daytime daytime.c
% ./daytime
52079 01-06-19 02:29:25 50 0 1 543.9 UTC(NIST) *
%In this case, the date was June 19, 2001, the time was 02:29:25 UTC. Naturally, your results will vary.
7.5.1.3. Server Functions
The typical server does not initiate the connection. Instead, it waits for a client to call it and request services. It does not know when the client will call, nor how many clients will call. It may be just sitting there, waiting patiently, one moment, The next moment, it can find itself swamped with requests from a number of clients, all calling in at the same time.
The sockets interface offers three basic functions to handle this.
bind
Ports are like extensions to a phone line: After you dial a number, you dial the extension to get to a specific person or department.
There are 65535 IP ports, but a server usually processes requests that come in on only one of them. It is like telling the phone room operator that we are now at work and available to answer the phone at a specific extension. We use bind(2) to tell sockets which port we want to serve.
int bind(int s, const struct sockaddr *addr, socklen_t addrlen);
Beside specifying the port in addr, the server may include its IP address.
However, it can just use the symbolic constant INADDR_ANY to indicate it will serve all requests to the specified port regardless of what its IP address is.
This symbol, along with several similar ones, is declared in netinet/in.h
#define INADDR_ANY (u_int32_t)0x00000000
Suppose we were writing a server for the daytime protocol over TCP/IP.
Recall that it uses port 13.
Our sockaddr_in structure would look like this:
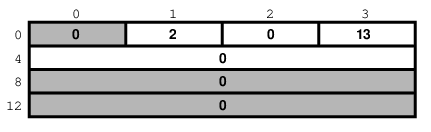
Figure 9. Example Server sockaddr_in
listen
To continue our office phone analogy, after you have told the phone central operator what extension you will be at, you now walk into your office, and make sure your own phone is plugged in and the ringer is turned on. Plus, you make sure your call waiting is activated, so you can hear the phone ring even while you are talking to someone.
The server ensures all of that with the listen(2) function.
int listen(int s, int backlog);
In here, the backlog variable tells sockets how many incoming requests to accept while you are busy processing the last request.
In other words, it determines the maximum size of the queue of pending connections.
accept
After you hear the phone ringing, you accept the call by answering the call. You have now established a connection with your client. This connection remains active until either you or your client hang up.
The server accepts the connection by using the accept(2) function.
int accept(int s, struct sockaddr *addr, socklen_t *addrlen);
Note that this time addrlen is a pointer.
This is necessary because in this case it is the socket that fills out addr, the sockaddr_in structure.
The return value is an integer.
Indeed, the accept returns a new socket.
You will use this new socket to communicate with the client.
What happens to the old socket? It continues to listen for more requests (remember the backlog variable we passed to listen?) until we close it.
Now, the new socket is meant only for communications.
It is fully connected.
We cannot pass it to listen again, trying to accept additional connections.
Our First Server
Our first server will be somewhat more complex than our first client was: Not only do we have more sockets functions to use, but we need to write it as a daemon.
This is best achieved by creating a child process after binding the port. The main process then exits and returns control to the shell (or whatever program invoked it).
The child calls listen, then starts an endless loop, which accepts a connection, serves it, and eventually closes its socket.
/*
* daytimed - a port 13 server
*
* Programmed by G. Adam Stanislav
* June 19, 2001
*/
#include <stdio.h>
#include <string.h>
#include <time.h>
#include <unistd.h>
#include <sys/types.h>
#include <sys/socket.h>
#include <netinet/in.h>
#define BACKLOG 4
int main() {
int s, c;
socklen_t b;
struct sockaddr_in sa;
time_t t;
struct tm *tm;
FILE *client;
if ((s = socket(PF_INET, SOCK_STREAM, 0)) < 0) {
perror("socket");
return 1;
}
memset(&sa, '\0', sizeof(sa));
sa.sin_family = AF_INET;
sa.sin_port = htons(13);
if (INADDR_ANY)
sa.sin_addr.s_addr = htonl(INADDR_ANY);
if (bind(s, (struct sockaddr *)&sa, sizeof sa) < 0) {
perror("bind");
return 2;
}
switch (fork()) {
case -1:
perror("fork");
return 3;
default:
close(s);
return 0;
case 0:
break;
}
listen(s, BACKLOG);
for (;;) {
b = sizeof sa;
if ((c = accept(s, (struct sockaddr *)&sa, &b)) < 0) {
perror("daytimed accept");
return 4;
}
if ((client = fdopen(c, "w")) == NULL) {
perror("daytimed fdopen");
return 5;
}
if ((t = time(NULL)) < 0) {
perror("daytimed time");
return 6;
}
tm = gmtime(&t);
fprintf(client, "%.4i-%.2i-%.2iT%.2i:%.2i:%.2iZ\n",
tm->tm_year + 1900,
tm->tm_mon + 1,
tm->tm_mday,
tm->tm_hour,
tm->tm_min,
tm->tm_sec);
fclose(client);
}
}We start by creating a socket.
Then we fill out the sockaddr_in structure in sa.
Note the conditional use of INADDR_ANY:
if (INADDR_ANY)
sa.sin_addr.s_addr = htonl(INADDR_ANY);Its value is 0.
Since we have just used memset to set zeroes on the entire structure, it would be redundant to set it to 0 again.
But if we port our code to some other system where INADDR_ANY is perhaps not a zero, we need to assign it to sa.sin_addr.s_addr.
Most modern C compilers are clever enough to notice that INADDR_ANY is a constant.
As long as it is a zero, they will optimize the entire conditional statement out of the code.
After we have called bind successfully, we are ready to become a daemon: We use fork to create a child process.
In both, the parent and the child, the s variable is our socket.
The parent process will not need it, so it calls close, then it returns 0 to inform its own parent it had terminated successfully.
Meanwhile, the child process continues working in the background.
It calls listen and sets its backlog to 4.
It does not need a large value here because daytime is not a protocol many clients request all the time,
and because it can process each request instantly anyway.
Finally, the daemon starts an endless loop, which performs the following steps:
Call
accept. It waits here until a client contacts it. At that point, it receives a new socket,c, which it can use to communicate with this particular client.It uses the C function
fdopento turn the socket from a low-level file descriptor to a C-styleFILEpointer. This will allow the use offprintflater on.It checks the time, and prints it in the ISO 8601 format to the
client"file". It then usesfcloseto close the file. That will automatically close the socket as well.
We can generalize this, and use it as a model for many other servers:
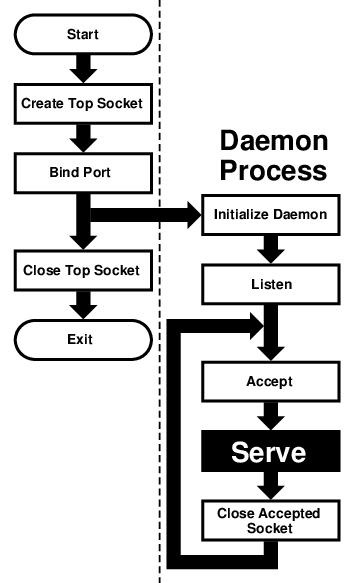
Figure 10. Sequential Server
This flowchart is good for sequential servers, i.e., servers that can serve one client at a time, just as we were able to with our daytime server. This is only possible whenever there is no real "conversation" going on between the client and the server: As soon as the server detects a connection to the client, it sends out some data and closes the connection. The entire operation may take nanoseconds, and it is finished.
The advantage of this flowchart is that, except for the brief moment after the parent forks and before it exits,
there is always only one process active: Our server does not take up much memory and other system resources.
Note that we have added initialize daemon in our flowchart.
We did not need to initialize our own daemon, but this is a good place in the flow of the program to set up any signal handlers,
open any files we may need, etc.
Just about everything in the flow chart can be used literally on many different servers. The serve entry is the exception. We think of it as a "black box", i.e., something you design specifically for your own server, and just "plug it into the rest."
Not all protocols are that simple. Many receive a request from the client, reply to it, then receive another request from the same client. As a result, they do not know in advance how long they will be serving the client. Such servers usually start a new process for each client. While the new process is serving its client, the daemon can continue listening for more connections.
Now, go ahead, save the above source code as daytimed.c (it is customary to end the names of daemons with the letter d).
After you have compiled it, try running it:
% ./daytimed
bind: Permission denied
%What happened here? As you will recall, the daytime protocol uses port 13. But all ports below 1024 are reserved to the superuser (otherwise, anyone could start a daemon pretending to serve a commonly used port, while causing a security breach).
Try again, this time as the superuser:
# ./daytimed
#What… Nothing? Let us try again:
# ./daytimed
bind: Address already in use
#Every port can only be bound by one program at a time. Our first attempt was indeed successful: It started the child daemon and returned quietly. It is still running and will continue to run until you either kill it, or any of its system calls fail, or you reboot the system.
Fine, we know it is running in the background. But is it working? How do we know it is a proper daytime server? Simple:
% telnet localhost 13
Trying ::1...
telnet: connect to address ::1: Connection refused
Trying 127.0.0.1...
Connected to localhost.
Escape character is '^]'.
2001-06-19T21:04:42Z
Connection closed by foreign host.
%telnet tried the new IPv6, and failed. It retried with IPv4 and succeeded. The daemon works.
If you have access to another UNIX® system via telnet, you can use it to test accessing the server remotely. My computer does not have a static IP address, so this is what I did:
% who
whizkid ttyp0 Jun 19 16:59 (216.127.220.143)
xxx ttyp1 Jun 19 16:06 (xx.xx.xx.xx)
% telnet 216.127.220.143 13
Trying 216.127.220.143...
Connected to r47.bfm.org.
Escape character is '^]'.
2001-06-19T21:31:11Z
Connection closed by foreign host.
%Again, it worked. Will it work using the domain name?
% telnet r47.bfm.org 13
Trying 216.127.220.143...
Connected to r47.bfm.org.
Escape character is '^]'.
2001-06-19T21:31:40Z
Connection closed by foreign host.
%By the way, telnet prints the Connection closed by foreign host message after our daemon has closed the socket.
This shows us that, indeed, using fclose(client); in our code works as advertised.
7.6. Helper Functions
FreeBSD C library contains many helper functions for sockets programming.
For example, in our sample client we hard coded the time.nist.gov IP address.
But we do not always know the IP address.
Even if we do, our software is more flexible if it allows the user to enter the IP address, or even the domain name.
7.6.1. gethostbyname
While there is no way to pass the domain name directly to any of the sockets functions, the FreeBSD C library comes with the gethostbyname(3) and gethostbyname2(3) functions, declared in netdb.h.
struct hostent * gethostbyname(const char *name); struct hostent * gethostbyname2(const char *name, int af);
Both return a pointer to the hostent structure, with much information about the domain.
For our purposes, the h_addr_list[0] field of the structure points at h_length bytes of the correct address, already stored in the network byte order.
This allows us to create a much more flexible-and much more useful-version of our daytime program:
/*
* daytime.c
*
* Programmed by G. Adam Stanislav
* 19 June 2001
*/
#include <stdio.h>
#include <string.h>
#include <unistd.h>
#include <sys/types.h>
#include <sys/socket.h>
#include <netinet/in.h>
#include <netdb.h>
int main(int argc, char *argv[]) {
int s, bytes;
struct sockaddr_in sa;
struct hostent *he;
char buf[BUFSIZ+1];
char *host;
if ((s = socket(PF_INET, SOCK_STREAM, 0)) < 0) {
perror("socket");
return 1;
}
memset(&sa, '\0', sizeof(sa));
sa.sin_family = AF_INET;
sa.sin_port = htons(13);
host = (argc > 1) ? argv[1] : "time.nist.gov";
if ((he = gethostbyname(host)) == NULL) {
herror(host);
return 2;
}
memcpy(&sa.sin_addr, he->h_addr_list[0], he->h_length);
if (connect(s, (struct sockaddr *)&sa, sizeof sa) < 0) {
perror("connect");
return 3;
}
while ((bytes = read(s, buf, BUFSIZ)) > 0)
write(1, buf, bytes);
close(s);
return 0;
}We now can type a domain name (or an IP address, it works both ways) on the command line, and the program will try to connect to its daytime server.
Otherwise, it will still default to time.nist.gov.
However, even in this case we will use gethostbyname rather than hard coding 132.163.96.1.
That way, even if its IP address changes in the future, we will still find it.
Since it takes virtually no time to get the time from your local server, you could run daytime twice in a row:
First to get the time from time.nist.gov, the second time from your own system.
You can then compare the results and see how exact your system clock is:
% daytime ; daytime localhost
52080 01-06-20 04:02:33 50 0 0 390.2 UTC(NIST) *
2001-06-20T04:02:35Z
%As you can see, my system was two seconds ahead of the NIST time.
7.6.2. getservbyname
Sometimes you may not be sure what port a certain service uses. The getservbyname(3) function, also declared in netdb.h comes in very handy in those cases:
struct servent * getservbyname(const char *name, const char *proto);
The servent structure contains the s_port, which contains the proper port, already in network byte order.
Had we not known the correct port for the daytime service, we could have found it this way:
struct servent *se;
...
if ((se = getservbyname("daytime", "tcp")) == NULL {
fprintf(stderr, "Cannot determine which port to use.\n");
return 7;
}
sa.sin_port = se->s_port;You usually do know the port.
But if you are developing a new protocol, you may be testing it on an unofficial port.
Some day, you will register the protocol and its port (if nowhere else, at least in your /etc/services, which is where getservbyname looks).
Instead of returning an error in the above code, you just use the temporary port number.
Once you have listed the protocol in /etc/services, your software will find its port without you having to rewrite the code.
7.7. Concurrent Servers
Unlike a sequential server, a concurrent server has to be able to serve more than one client at a time. For example, a chat server may be serving a specific client for hours-it cannot wait till it stops serving a client before it serves the next one.
This requires a significant change in our flowchart:
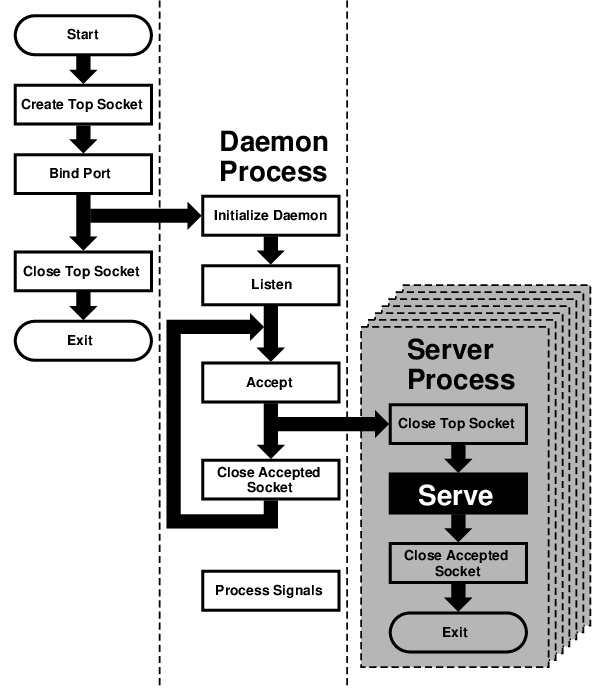
Figure 11. Concurrent Server
We moved the serve from the daemon process to its own server process.
However, because each child process inherits all open files (and a socket is treated just like a file), the new process inherits not only the "accepted handle," i.e., the socket returned by the accept call, but also the top socket, i.e., the one opened by the top process right at the beginning.
However, the server process does not need this socket and should close it immediately.
Similarly, the daemon process no longer needs the accepted socket, and not only should, but must close it-otherwise, it will run out of available file descriptors sooner or later.
After the server process is done serving, it should close the accepted socket.
Instead of returning to accept, it now exits.
Under UNIX®, a process does not really exit.
Instead, it returns to its parent.
Typically, a parent process waits for its child process, and obtains a return value.
However, our daemon process cannot simply stop and wait.
That would defeat the whole purpose of creating additional processes.
But if it never does wait, its children will become zombies-no longer functional but still roaming around.
For that reason, the daemon process needs to set signal handlers in its initialize daemon phase. At least a SIGCHLD signal has to be processed, so the daemon can remove the zombie return values from the system and release the system resources they are taking up.
That is why our flowchart now contains a process signals box, which is not connected to any other box. By the way, many servers also process SIGHUP, and typically interpret as the signal from the superuser that they should reread their configuration files. This allows us to change settings without having to kill and restart these servers.
Last modified on: June 18, 2026 by Alexander Ziaee